 Version
1.2
Version
1.2
 Paketname
org.zwiener.wimu
Paketname
org.zwiener.wimu
 Kategorie
Praktische Werkzeuge
Kategorie
Praktische Werkzeuge
 Größe
28.72KB
Größe
28.72KB
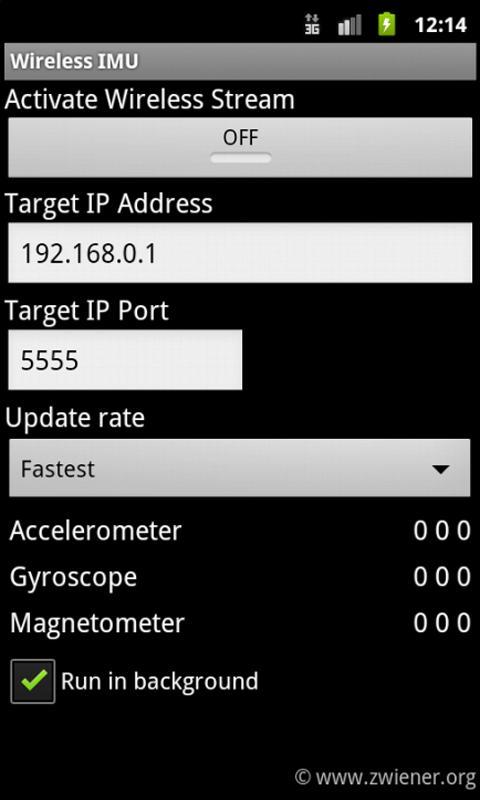
Verwandeln Sie Ihr Smartphone in eine drahtlose Trägheitsmesseinheit (IMU).
Diese App sendet die Messungen von Ihren Inertialsensoren von Ihren Telefonen über UDP als CSV (Comma-getrennte Werte) an einen Computer in Ihrem Netzwerk.
Dies verwandelt Ihr Telefon in eine drahtlose Trägheitsmesseinheit (IMU).
Die folgenden Sensoren werden unterstützt:
- Beschleunigungsmesser
- Gyroskop
- Magnetometer
Wenn Ihr Telefon nicht über alle diese Sensoren verfügt, werden nur die verfügbaren Sensordaten übertragen.
Beispiel UDP -Paket:
890.71558, 3, 0,076, 9,809, 0,565, 4, -0,559, 0,032, -0,134, 5, -21,660, -36,960, -28,1400
TIMESTAMP [SEC], Sensorid, X, Y, Z, Sensorid, X, Y, Z, Sensorid, X, Y, Z.
Sensor -ID:
3 - Beschleunigungsmesser (m/s^2)
4 - Gyroskop (rad/s)
5 - Magnetometer (Micro -Tesla UT)
Sie können diese App im Hintergrund ausführen.
Ein Warndialog wird angezeigt, wenn Sie nicht mit einem WLAN -Netzwerk verbunden sind.
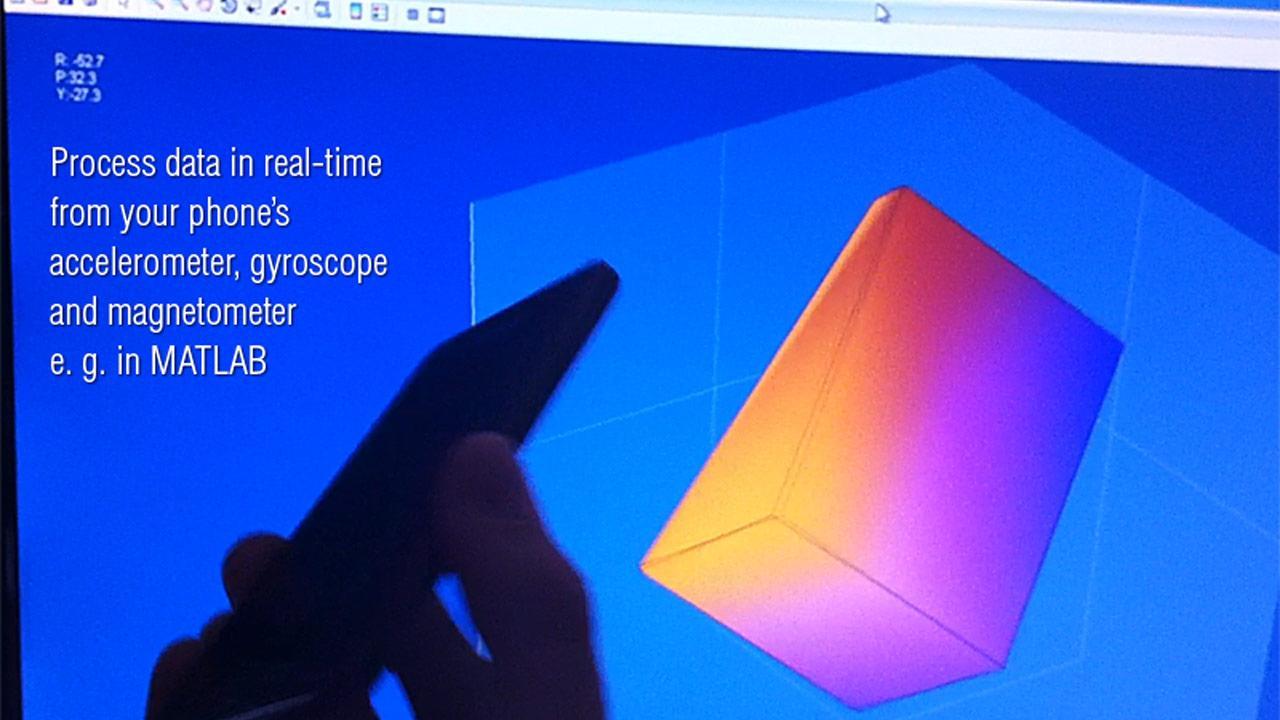
Im Beispielvideo wird der Stream direkt von einem Matlab -Skript für die Kalman -Filterung verarbeitet. Aber es liegt an Ihnen, was Sie mit den Daten machen.
Mit dem folgenden Python -Skript können Sie den UDP -Datenstrom von Ihrem Telefon aus erfassen:
# ---------------------------------------------------
Socket importieren, Traceback
Host = ''
Port = 5555
s = socket.socket (socket.af_inet, socket.sock_dgram)
setsockopt (socket.sol_socket, socket.so_reuseaddr, 1)
S.Setsockopt (Socket.Sol_Socket, Socket.so_Broadcast, 1)
S.Bind ((Host, Port))
während 1:
versuchen:
Nachricht, Adresse = S.Recvfrom (8192)
Meldung drucken
Außer (TastaryBoyPinrupt, SystemExit):
erheben
außer:
TraceBack.print_exc ()
# ---------------------------------------------------





 Herunterladen APK(28.72KB)
Herunterladen APK(28.72KB)